Die Technik der gefilterten Rückprojektion ist eine der etabliertesten algorithmischen Techniken für dieses Problem. Sie ist konzeptionell einfach, abstimmbar und deterministisch. Dies ist jedoch nicht die einzige verfügbare Technik: Der ursprüngliche EMI-Scanner löste das tomografische Rekonstruktionsproblem durch lineare Algebra, aber dieser Ansatz war durch seine hohe Rechenkomplexität begrenzt, insbesondere angesichts der damals verfügbaren Computertechnologie. In jüngerer Zeit haben die Hersteller iterative, auf dem physikalischen Modell basierende Maximum-Likelihood-Erwartungsmaximierungsverfahren entwickelt. Diese Verfahren sind vorteilhaft, weil sie ein internes Modell der physikalischen Eigenschaften des Scanners und der physikalischen Gesetze der Röntgenwechselwirkung verwenden. Frühere Methoden, wie die gefilterte Rückprojektion, gehen von einem perfekten Scanner und stark vereinfachten physikalischen Gegebenheiten aus, was zu einer Reihe von Artefakten, starkem Rauschen und schlechterer Bildauflösung führt. Iterative Verfahren liefern Bilder mit besserer Auflösung, geringerem Rauschen und weniger Artefakten und können unter bestimmten Umständen die Strahlendosis erheblich reduzieren. Der Nachteil ist ein sehr hoher Rechenaufwand, aber Fortschritte in der Computertechnologie und Hochleistungsrechnertechniken, wie die Verwendung hochparalleler GPU-Algorithmen oder die Verwendung von Spezialhardware wie FPGAs oder ASICs, ermöglichen jetzt den praktischen Einsatz.
GrundprinzipBearbeiten
In diesem Abschnitt wird das Grundprinzip der Tomographie für den Fall erläutert, dass speziell die Tomographie unter Verwendung des optischen Systems mit paralleler Strahlung eingesetzt wird.
Tomographie ist eine Technologie, bei der ein tomographisches optisches System verwendet wird, um virtuelle „Schnitte“ (ein tomographisches Bild) eines bestimmten Querschnitts eines gescannten Objekts zu erhalten, die es dem Benutzer ermöglichen, in das Innere des Objekts zu sehen, ohne zu schneiden. Es gibt verschiedene Arten von tomografischen optischen Systemen, darunter das optische System mit paralleler Strahlung. Das optische System mit parallelen Strahlen ist das einfachste und praktischste Beispiel für ein optisches Tomographiesystem, weshalb in diesem Artikel die Erklärung „Wie man ein tomographisches Bild erhält“ auf dem optischen System mit parallelen Strahlen basiert. Die Auflösung in der Tomographie wird in der Regel durch das Crowther-Kriterium beschrieben.
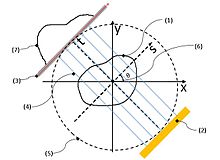
Die Abb. 3 soll das mathematische Modell veranschaulichen und das Prinzip der Tomographie verdeutlichen. In der Abb.3 wird der Absorptionskoeffizient an einer Querschnittskoordinate (x, y) des Probanden als μ(x, y) modelliert. Eine Betrachtung auf der Grundlage der obigen Annahmen kann die folgenden Punkte klären. Daher wird in diesem Abschnitt die Erklärung in der folgenden Reihenfolge fortgesetzt:
- (1)Die Ergebnisse der Messung, d.h. eine Reihe von Bildern, die durch Durchlicht erhalten wurden, werden als eine Funktion p (s,θ) ausgedrückt (modelliert), die durch Durchführung einer Radontransformation in μ(x, y) erhalten wird, und
- (2)μ(x, y) wird durch Durchführung einer inversen Radontransformation in die Messergebnisse wiederhergestellt.
(1)Die Ergebnisse der Messung p(s,θ) des optischen Systems mit paralleler BestrahlungBearbeiten
Betrachten wir das mathematische Modell so, dass der Absorptionskoeffizient des Objekts an jedem (x,y) durch μ(x,y) dargestellt wird, und nehmen wir an, dass „der Transmissionsstrahl ohne Beugung, Streuung oder Reflexion durchdringt, obwohl er vom Objekt absorbiert wird und seine Abschwächung gemäß dem Beer-Lambert-Gesetz angenommen wird.In diesem Fall ist das, was wir wissen wollen, μ(x,y) und das, was wir messen können, p(s,θ).
Wenn die Abschwächung dem Beer-Lambert-Gesetz entspricht, ist die Beziehung zwischen I 0 {\displaystyle {I}_{0}}

und I {\displaystyle I}

ist wie folgt (Gl.1) und daher ist die Absorption ( p l {\displaystyle p_{l}}

) entlang des Lichtstrahlengangs (l(t)) wie folgt (Gl.2). Dabei ist der I 0 {\displaystyle {I}_{0}}
die Intensität des Lichtstrahls vor der Übertragung I {\displaystyle I}
ist die Intensität nach der Übertragung. I = I 0 exp ( – ∫ μ ( x , y ) d l ) = I 0 exp ( – ∫ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t ) {\displaystyle I=I_{0}\exp \left({-\int \mu (x,y)\,dl}\right)=I_{0}\exp \left({-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{-{\int }_{-\infty }^{\infty }\mu(l(t))\,|\dt}\rechts)}

(Gl. 1) p l = ln ( I / I 0 ) = – ∫ μ ( x , y ) d l = – ∫ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t {\displaystyle p_{l}=\ln(I/I_{0})=-\int \mu (x,y)\,dl=-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{\dot {l}}(t)|dt}

(eq. 2)
Hier wird eine Richtung von der Lichtquelle zum Bildschirm als t-Richtung und die Richtung senkrecht zur t-Richtung und parallel zum Bildschirm als s-Richtung definiert. (Sowohl das t-s- als auch das x-y-Koordinatensystem sind so eingerichtet, dass sie sich ohne spiegelbildliche Transformation gegenseitig reflektieren.)
Bei Verwendung eines optischen Systems mit paralleler Strahlung kann man experimentell eine Reihe von fluoroskopischen Bildern (eindimensionale Bilder“ pθ(s) eines bestimmten Querschnitts eines gescannten Objekts) für jedes θ erhalten. θ steht dabei für den Winkel zwischen dem Objekt und dem Transmissionslichtstrahl. In Abb. 3 dreht sich die X-Y-Ebene gegen den Uhrzeigersinn um den Ursprungspunkt in der Ebene, um „die gegenseitige Positionsbeziehung zwischen der Lichtquelle (2) und dem Bildschirm (7), der die Bahn (5) durchläuft, aufrechtzuerhalten.“ Der Drehwinkel ist in diesem Fall derselbe wie der oben erwähnte θ.
Der Strahl, der einen Winkel θ hat, wird die Ansammlung von Lagen sein, dargestellt durch l ( t ) {\displaystyle {l}_{}(t)}

der folgenden (Gl. 3). l ( t ) = t + {\displaystyle {l}_{}(t)=t{\begin{bmatrix}-\sin \theta \\\cos \theta \\\\end{bmatrix}}+{\begin{bmatrix}s\cos \theta \\\s\sin \theta \\end{bmatrix}}

(Gl. 3)
Das pθ(s) ist durch folgende (Gl. 4) definiert. Dass p θ ( s ) {\displaystyle p_{\theta }(s)}

ist gleich dem Linienintegral von μ(x,y) entlang l ( t ) {\displaystyle {l}_{}(t)}
von (Gl. 3) auf die gleiche Weise wie von (Gl. 2). Das bedeutet, dass p ( s , θ ) {\displaystyle p(s,\theta )}

der folgenden (eq. 5) eine Resultierende der Radon-Transformation von μ(x,y) ist. p θ ( s ) = – ∫ – ∞ ∞ μ ( s cos θ – t sin θ , s sin θ + t cos θ ) d t {\displaystyle p_{\theta }(s)=-{\int }_{-\infty }^{\infty }\mu (s\cos \theta -t\sin \theta ,s\sin \theta +t\cos \theta )\,dt}

(Gl. 4)
Man kann folgende Funktion zweier Variablen definieren (Gl. 5). In diesem Artikel wird das folgende p(s, θ) als „die Sammlung von Durchleuchtungsbildern“ bezeichnet.
p (s, θ)=pθ(s) (eq. 5)
(2)μ(x, y) wird durch inverse Radon-Transformation der Messergebnisse wiederhergestelltEdit
„Was wir wissen wollen (μ(x,y))“ kann aus „Was wir gemessen haben ( p(s,θ))“ durch inverse Radon-Transformation rekonstruiert werden.In den oben genannten Beschreibungen ist „Was wir gemessen haben“ p(s,θ) . Andererseits ist „Was wir wissen wollen“ μ(x,y). Die nächste Frage lautet also: „Wie kann man μ(x,y) aus p(s,θ) rekonstruieren“.