Una configuración flyback es la topología preferida en los diseños de aplicaciones SMPS principalmente porque garantiza el aislamiento completo de la CC de salida de la CA de la red de entrada. Otras características son el bajo coste de fabricación, un diseño más sencillo y una implementación sin complicaciones. La versión DCM de baja corriente de los convertidores flyback que incluyen una especificación de salida inferior a 50 vatios son más utilizados que los homólogos de alta corriente más grandes.
Aprendamos los detalles con una explicación exhaustiva a través de los siguientes párrafos:
- Guía de diseño completa para convertidores flyback DCM de frecuencia fija fuera de línea
- Modos de operación flyback: DCM y CCM
- Ecuaciones de diseño de flyback DCM y requisitos de decisión secuencial
- Flyback con el modo DCM
- Cómo calcular Dmax dependiendo de Vreflejado y Vinmin
- Cómo calcular la corriente de inductancia primaria
- Cómo seleccionar el grado y el tamaño óptimos del núcleo:
- Cómo calcular las vueltas primarias mínimas o el devanado
- Cómo calcular el número de espiras para la salida secundaria principal (Ns) y las salidas auxiliares diversas (Naux)
- Cómo calcular el tamaño del cable para el devanado de salida seleccionado
- Considerar la construcción del transformador y el diseño del bobinado Iteración
- Cómo diseñar el circuito de abrazadera primaria
- Cómo seleccionar el valor del diodo de sujeción/Zener
- Cómo seleccionar el diodo rectificador de salida
- Cómo seleccionar el valor del condensador de salida
- A) Cómo seleccionar la tensión y la corriente nominal, para el rectificador de puente del lado primario.
- B) Cómo seleccionar la resistencia de detección de corriente (Rsense):
- C) Selección de la VCC del Condensador:
- D) Configuración del bucle de realimentación:
Guía de diseño completa para convertidores flyback DCM de frecuencia fija fuera de línea
Modos de operación flyback: DCM y CCM
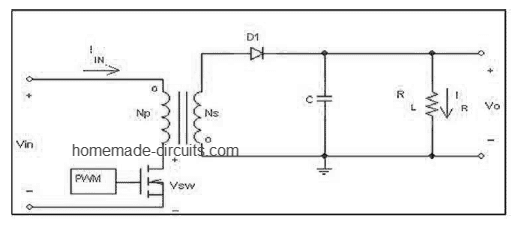
A continuación vemos el diseño esquemático fundamental de un convertidor flyback. Las secciones principales en este diseño son el transformador, el mosfet de potencia de conmutación Q1 en el lado primario, el puente rectificador en el lado secundario D1, un condensador de filtro para suavizar la salida de D1, y una etapa de controlador PWM que puede ser un circuito controlado por IC.
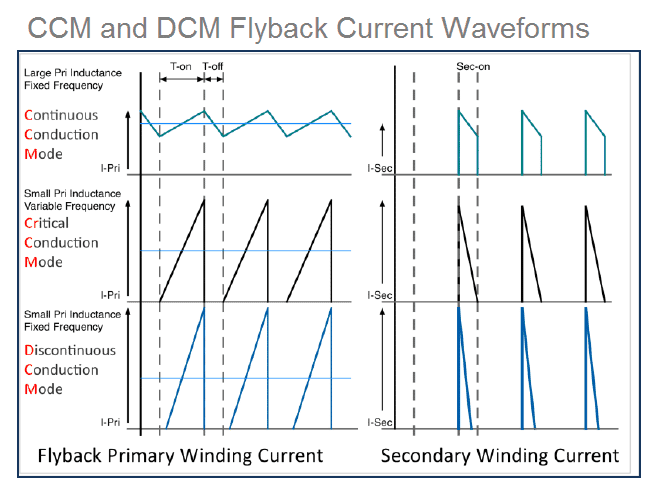
Este tipo de diseño flyback podría tener un modo de funcionamiento CCM (modo de conducción continua) o DCM (modo de conducción discontinua) en función de cómo esté configurado el MOSFET de potencia T1.
Básicamente, en el modo DCM tenemos toda la energía eléctrica almacenada en el primario del transformador transferida a través del lado secundario cada vez que el MOSFET se pone en OFF durante sus ciclos de conmutación (también llamado período de flyback), lo que lleva a que la corriente del lado primario alcance un potencial cero antes de que T1 pueda volver a ponerse en ON en su siguiente ciclo de conmutación.
En el modo CCM, la energía eléctrica almacenada en el primario no tiene la oportunidad de transferirse o inducirse completamente a través del secundario.
Esto se debe a que, cada uno de los siguientes pulsos de conmutación del controlador PWM pone en ON T1 antes de que el transformador haya transferido toda su energía almacenada a la carga. Esto implica que nunca se permite que la corriente flyback (ILPK e ISEC) alcance el potencial cero durante cada uno de los ciclos de conmutación.
Podemos atestiguar la diferencia entre los dos modos de funcionamiento en el siguiente diagrama a través de los patrones de forma de onda de corriente a través de la sección primaria y secundaria del transformador.
Tanto el modo DCM como el CCM tienen sus ventajas específicas, que pueden aprenderse de la siguiente tabla:
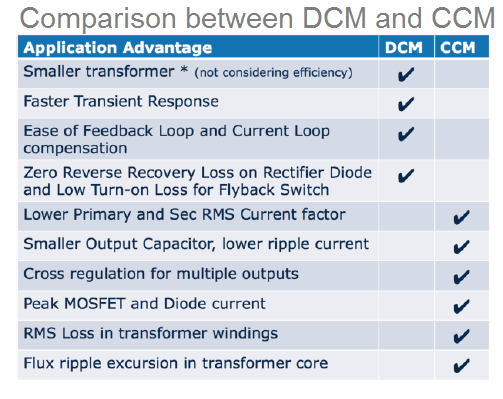
En comparación con el CCM, el circuito del modo DCM exige mayores niveles de corriente de pico para garantizar una potencia óptima a través del lado secundario del transformador. Esto, a su vez, exige que el lado primario tenga un valor nominal de corriente RMS más alto, lo que significa que el MOSFET debe tener un valor nominal en el rango más alto especificado.
En los casos en los que se requiere que el diseño se construya con un rango limitado de corriente de entrada y componentes, entonces normalmente se selecciona un fyback en modo CCM, lo que permite que el diseño emplee un condensador de filtro relativamente más pequeño, y una menor pérdida de conducción en el MOSFET y el transformador).
CCM se vuelve favorable para condiciones en las que el voltaje de entrada es menor, mientras que la corriente es mayor ( más de 6 amperios), diseños que pueden ser clasificados para trabajar con más de 50 vatios de potencia, a excepción de las salidas a 5V en las que la especificación de vatios podría ser inferior a 50 vatios.
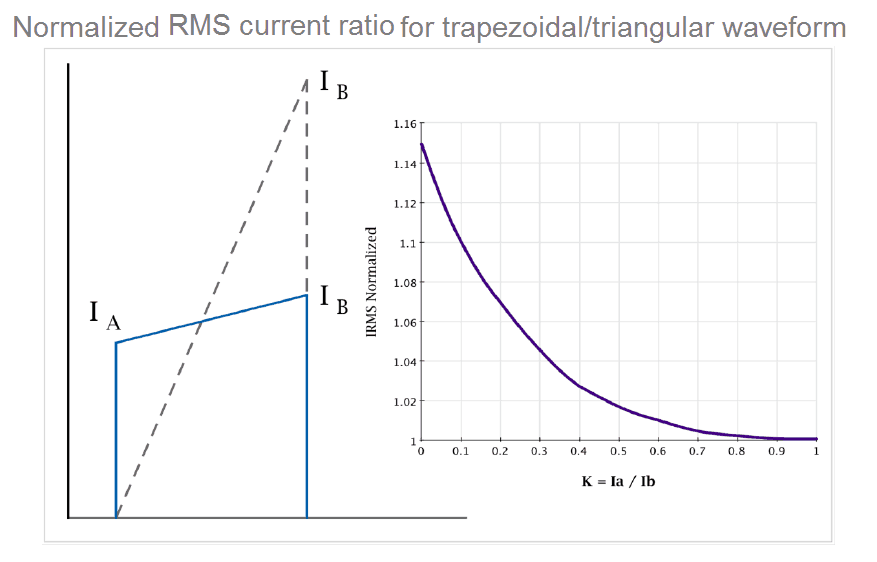
La imagen anterior indica la respuesta de la corriente en el lado primario de los modos flyback y la correspondiente relación entre sus formas de onda triangulares y trapezoidales.
IA en la forma de onda triangular indica el punto mínimo de inicialización que puede verse como cero, al comienzo del periodo de encendido del MOSFET, y también un mayor nivel de pico de corriente persistente en el devanado primario del transformador en el momento hasta que el MOSFET se enciende de nuevo, durante el modo de funcionamiento CCM.
IB puede percibirse como el punto final de la magnitud de la corriente mientras el interruptor del mosfet está en ON (intervalo Ton).
El valor normalizado de la corriente IRMS puede verse como la función del factor K (IA/IB) sobre el eje Y.
Se puede utilizar como multiplicador siempre que sea necesario calcular las pérdidas resistivas para un número variado de formas de onda con referencia a una forma de onda trapezoidal que tenga una forma de onda superior plana.
Esto también demuestra las pérdidas de conducción de CC adicionales inevitables del devanado del transformador y los transistores o diodos como una función de forma de onda de corriente. Utilizando estos consejos, el diseñador podrá evitar hasta un 10 o 15% de pérdidas de conducción con un diseño de convertidor tan bien calculado.
Considerar los criterios anteriores puede ser significativamente crucial para aplicaciones diseñadas para manejar altas corrientes RMS, y que exigen una eficiencia óptima como características clave.
Puede ser posible eliminar las pérdidas adicionales de cobre, aunque eso puede exigir un tamaño formidable del núcleo para acomodar el área esencial de la ventana del devanado más grande, en contraste con las situaciones en las que sólo las especificaciones del núcleo se vuelven cruciales.
Como hemos entendido hasta ahora, un modo de operación DCM permite el uso de un transformador de menor tamaño, posee una mayor respuesta transitoria y trabaja con pérdidas mínimas de conmutación.
Por lo tanto, este modo resulta muy recomendable para los circuitos flyback especificados para tensiones de salida más elevadas con requisitos de amperios relativamente menores.
Aunque es posible diseñar un convertidor flyback para que funcione con los modos DCM y CCM, hay que tener en cuenta que durante la transición del modo DCM al CCM, esta función de conmutación se transforma en una operación de 2 polos, dando lugar a una baja impedancia para el convertidor.
Esta situación hace imprescindible la incorporación de estrategias de diseño adicionales, incluyendo varios lazos (de realimentación) y la compensación de la pendiente con respecto al sistema del bucle de corriente interior. En la práctica, esto implica que tenemos que asegurarnos de que el convertidor está diseñado principalmente para un modo CCM, pero es capaz de trabajar con el modo DCM cuando se utilizan cargas más ligeras en la salida.
Puede ser interesante saber que utilizando modelos avanzados de transformadores, puede llegar a ser posible mejorar un convertidor CCM a través de una regulación de carga más limpia y ligera, así como una alta regulación cruzada en un amplio rango de carga a través de un transformador de separación escalonada.
En estos casos se impone un pequeño hueco en el núcleo mediante la inserción de un elemento externo, como una cinta aislante o un papel, para inducir inicialmente una alta inductancia y permitir también el funcionamiento del CCM con cargas más ligeras. Discutiremos esto en detalle en mis próximos artículos.
Al tener unas características de modo DCM tan versátiles, no es de extrañar que se convierta en la opción más popular siempre que se requiera diseñar un SMPS sin problemas, eficiente y de baja potencia.
A continuación aprenderemos las instrucciones paso a paso sobre cómo diseñar un convertidor flyback en modo DCM.
Ecuaciones de diseño de flyback DCM y requisitos de decisión secuencial
Paso#1:
Evaluar y estimar sus requisitos de diseño. Todo diseño de SMPS debe comenzar por evaluar y determinar las especificaciones del sistema. Deberá definir y asignar los siguientes parámetros:
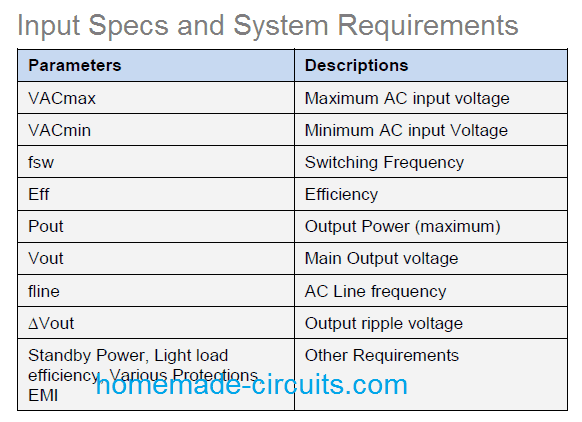
Sabemos que el parámetro de eficiencia es el crucial que debe decidirse en primer lugar, la forma más fácil es establecer un objetivo de alrededor del 75% al 80%, incluso si su diseño es de bajo coste. La frecuencia de conmutación, denominada
Fsw, generalmente tiene que ser comprometida mientras se obtiene lo mejor del tamaño del transformador y las pérdidas incurridas debido a la conmutación, y la EMI. Lo que implica que uno puede necesitar decidir sobre una frecuencia de conmutación al menos por debajo de 150kHz. Normalmente, esto puede ser seleccionado entre un rango de 50kHz y 100kHz.
Además, en caso de que se requiera incluir más de una salida para el diseño, el valor de la potencia máxima Pout tendrá que ajustarse como el valor combinado de las dos salidas.
Puede que le resulte interesante saber que hasta hace poco los diseños de SMPS convencionales más populares solían tener el mosfet y el controlador de conmutación PWM como dos etapas aisladas diferentes, integradas juntas sobre un diseño de PCB, pero hoy en día en las unidades de SMPS modernas estas dos etapas se pueden encontrar incrustadas dentro de un paquete y fabricadas como CI individuales.
Principalmente, los parámetros que se suelen tener en cuenta a la hora de diseñar un convertidor SMPS flyback son: 1) la aplicación o las especificaciones de la carga, 2) el coste, 3) la potencia en espera y 4) las características de protección adicionales.
Cuando se utilizan circuitos integrados, las cosas suelen ser mucho más fáciles, ya que sólo es necesario calcular el transformador y unos pocos componentes pasivos externos para diseñar un convertidor flyback óptimo.
Entremos en detalles sobre los cálculos necesarios para diseñar un SMPS flaback.
Calcular el condensador de entrada Cin, y el rango de tensión continua de entrada
Dependiendo de la tensión de entrada y de las especificaciones de potencia, la regla estándar para seleccionar Cin, que también se denomina condensador de enlace de CC, se puede aprender de las siguientes explicaciones:
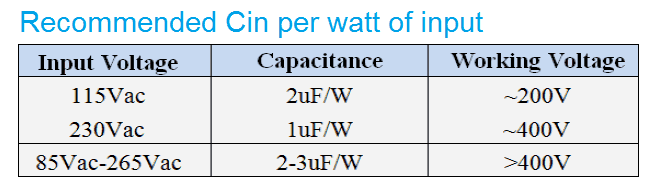
Con el fin de garantizar un amplio rango de funcionamiento, se puede elegir un valor de 2uF por vatio o superior para un condensador de enlace de CC, lo que le permitirá tener un buen rango de calidad para este componente.
A continuación, puede ser necesario determinar la tensión mínima de entrada de CC que puede obtenerse resolviendo:
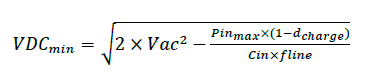
Donde la descarga se convierte en la relación de trabajo del condensador de enlace de CC, que puede ser aproximadamente alrededor de 0,2
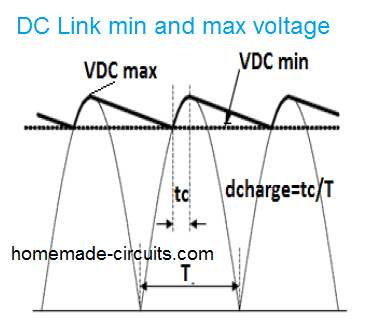
En la figura anterior podemos visualizar la tensión del condensador de enlace de CC. Como se muestra, la tensión de entrada surge durante la máxima potencia de salida y la mínima tensión de CA de entrada, mientras que la máxima tensión de entrada de CC surge durante la mínima potencia de entrada (ausencia de carga) y durante la máxima tensión de CA de entrada.
Durante la condición de ausencia de carga, podemos ver una tensión de entrada de CC máxima, durante la cual el condensador se carga al nivel de pico de la tensión de entrada de CA, y estos valores pueden expresarse con la siguiente ecuación:

Paso3:
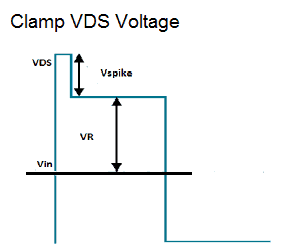
Evaluar la tensión inducida por el Flyback VR, y la tensión máxima en el MOSFET VDS. La tensión inducida por el Flyback VR podría entenderse como la tensión inducida a través del lado primario del transformador cuando el mosfet Q1 está en condición de apagado.
La función anterior, a su vez, influye en el valor nominal máximo de VDS del mosfet, que puede confirmarse e identificarse resolviendo la siguiente ecuación:

Donde, Vspike es el pico de tensión generado debido a la inductancia de fuga del transformador.
Para empezar, se puede tomar un 30% de Vspike fuera de VDSmáx.
La siguiente lista nos indica cuánta tensión reflejada o inducida se puede recomendar para un MOSFET de 650V a 800V de potencia nominal, y teniendo un valor límite inicial VR inferior a 100V para un amplio rango de tensión de entrada esperado.

Elegir el VR adecuado puede ser una ganga entre el nivel de tensión sobre el rectificador secundario, y las especificaciones del mosfet del lado primario.
Si el VR se selecciona muy alto a través de una mayor relación de espiras, daría lugar a un mayor VDSmax, pero un menor nivel de estrés de tensión sobre el diodo del lado secundario.
Y si el VR se selecciona demasiado pequeño a través de una menor relación de espiras, haría que el VDSmax fuera menor, pero daría lugar a un aumento en el nivel de estrés sobre el diodo secundario.
Un VDSmax más grande en el lado primario aseguraría no sólo un menor nivel de estrés en el diodo del lado secundario y la reducción de la corriente primaria, sino que también permitirá un diseño rentable para ser implementado.
Flyback con el modo DCM
Cómo calcular Dmax dependiendo de Vreflejado y Vinmin
Un ciclo de trabajo máximo se puede esperar en instancias de VDCmin. Para esta situación podemos diseñar el transformador a lo largo de los umbrales de DCM y CCM. En este caso el ciclo de trabajo podría presentarse como:

Paso 4:
Cómo calcular la corriente de inductancia primaria
En este paso calcularemos la inductancia primaria y la corriente de pico primaria.
Podríamos utilizar las siguientes fórmulas para identificar la corriente de pico del primario:

Una vez conseguido lo anterior podemos pasar a calcular la inductancia del primario utilizando la siguiente fórmula, dentro de los límites del ciclo de trabajo máximo.

Hay que tener cuidado con el flyback, no debe entrar en el modo CCM debido a cualquier forma de condiciones de exceso de carga, y para ello se debe considerar la especificación de potencia máxima mientras se calcula Poutmax en la Ecuación#5. La condición mencionada también puede ocurrir en caso de que la inductancia se aumente por encima del valor Lprimax, así que tome nota de esto.
Paso5:
Cómo seleccionar el grado y el tamaño óptimos del núcleo:
Puede parecer bastante intimidante mientras se selecciona la especificación y la estructura correcta del núcleo si está diseñando un flyback por primera vez. Ya que esto puede implicar un número significativo de factores y variables a considerar. Algunas de las que pueden ser cruciales son la geometría del núcleo (por ejemplo, núcleo EE/RM/núcleo PQ, etc.), la dimensión del núcleo (por ejemplo, EE19, RM8 PQ20, etc.) y el material del núcleo (por ejemplo, 3C96. TP4, 3F3, etc.).
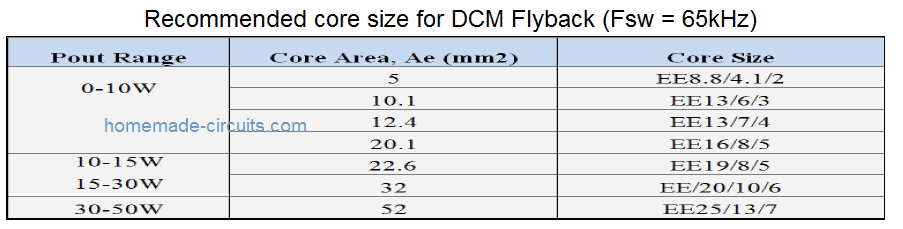
Si no tiene ni idea de cómo proceder con las especificaciones anteriores, una forma eficaz de contrarrestar este problema podría ser consultar una guía de selección de núcleos estándar por el fabricante del núcleo, o también puede tomar la ayuda a la siguiente tabla que le da aproximadamente las dimensiones del núcleo estándar, mientras que el diseño de un flyback DCM 65kHz, con referencia a la potencia de salida.
Una vez que haya terminado con la selección del tamaño del núcleo, es el momento de seleccionar la bobina correcta, que podría ser adquirida según la hoja de datos del núcleo. Las propiedades adicionales de la bobina, como el número de pines, el montaje en placa de circuito impreso o SMD, el posicionamiento horizontal o vertical, todo esto también puede ser considerado como el diseño preferido
El material del núcleo también es crucial y debe ser seleccionado en base a la frecuencia, la densidad de flujo magnético, y las pérdidas del núcleo.
Para empezar puede probar variantes con el nombre 3F3, 3C96, o TP4A, recuerde que los nombres del material del núcleo disponible pueden ser diferentes para tipos idénticos dependiendo de la fabricación particular.
Cómo calcular las vueltas primarias mínimas o el devanado

Donde el término Bmax significa la densidad de flujo máxima de funcionamiento, Lpri le habla de la inductancia primaria, Ipri se convierte en la corriente de pico primaria, mientras que Ae identifica el área de la sección transversal del tipo de núcleo seleccionado.
Hay que tener en cuenta que la Bmax nunca debe superar la densidad de flujo de saturación (Bsat) especificada en la ficha técnica del material del núcleo. Puede encontrar ligeras variaciones en Bsat para los núcleos de ferrita dependiendo de las especificaciones como el tipo de material y la temperatura; sin embargo, la mayoría de ellos tendrá un valor cercano a 400mT.
Si no encuentra datos de referencia detallados, puede optar por un Bmax de 300mT. Aunque seleccionar un Bmax más alto puede ayudar a tener un número reducido de vueltas primarias y una conducción más baja, la pérdida del núcleo puede aumentar significativamente. Intente optimizar entre los valores de estos parámetros, de manera que la pérdida en el núcleo y la pérdida en el cobre se mantengan dentro de límites aceptables.
Paso 6:
Cómo calcular el número de espiras para la salida secundaria principal (Ns) y las salidas auxiliares diversas (Naux)
Para determinar las espiras secundarias necesitamos primero encontrar la relación de espiras (n), que se puede calcular mediante la siguiente fórmula:

Donde Np son las vueltas primarias, y Ns es el número de vueltas secundarias, Vout significa la tensión de salida, y VD nos dice respecto a la caída de tensión a través del diodo secundario.
Para calcular las vueltas de las salidas auxiliares para un valor de Vcc deseado, se puede utilizar la siguiente fórmula:

En todos los convertidores flyback es fundamental un bobinado auxiliar para suministrar la alimentación inicial de arranque al CI de control. Esta alimentación VCC se utiliza normalmente para alimentar el CI de conmutación en el lado primario y podría fijarse según el valor indicado en la hoja de datos del CI. Si el cálculo da un valor no entero, simplemente redondéelo utilizando el valor entero superior justo por encima de este número no entero.
Cómo calcular el tamaño del cable para el devanado de salida seleccionado
Para calcular correctamente los tamaños de los cables para los distintos devanados, primero tenemos que averiguar la especificación de la corriente RMS para el devanado individual.
Puede hacerse con las siguientes fórmulas:


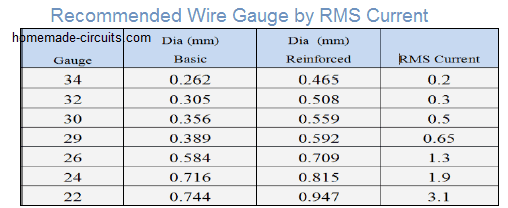
Como punto de partida, podría utilizarse una densidad de corriente de 150 a 400 milímetros circulares por Amperio, para determinar el calibre del cable. La siguiente tabla muestra la referencia para seleccionar el calibre del cable adecuado utilizando 200M/A, según el valor de la corriente RMS. También muestra el diámetro del cable y el aislamiento básico para un calibre variado de cables de cobre superesmaltado.
Paso8:
Considerar la construcción del transformador y el diseño del bobinado Iteración
Después de haber terminado de determinar los parámetros del transformador mencionados anteriormente, resulta crucial evaluar cómo encajar la dimensión del cable y el número de vueltas dentro del tamaño del núcleo del transformador calculado, y la bobina especificada. Para conseguirlo de forma óptima pueden ser necesarias varias iteraciones o experimentos para optimizar la especificación del núcleo con referencia al grosor del alambre y el número de vueltas.
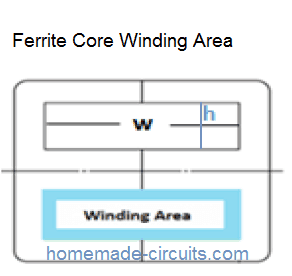
La siguiente figura indica el área de bobinado para un núcleo EE dado. Con referencia al grosor del alambre calculado y al número de vueltas para el devanado individual, puede ser posible estimar aproximadamente si el devanado se ajustará al área de devanado disponible (w y h) o no. Si el devanado no se ajusta, entonces uno de los parámetros del número de vueltas, el calibre del hilo o el tamaño del núcleo, o más de un parámetro, puede requerir un ajuste fino hasta que el devanado se ajuste de forma óptima.
La disposición del devanado es crucial ya que el rendimiento de trabajo, y la fiabilidad del transformador, dependen significativamente de ella. Se recomienda emplear una disposición o estructura en sándwich para el devanado con el fin de restringir las fugas de inductancia, como se indica en la Fig. 5.
Además, con el fin de satisfacer y cumplir las normas de seguridad internacionales, el diseño debe tener un rango suficiente de aislamiento en las capas primaria y secundaria del devanado. Esto puede garantizarse empleando una estructura de devanado con margen, o utilizando un hilo secundario con triple aislamiento, como se muestra en la siguiente figura
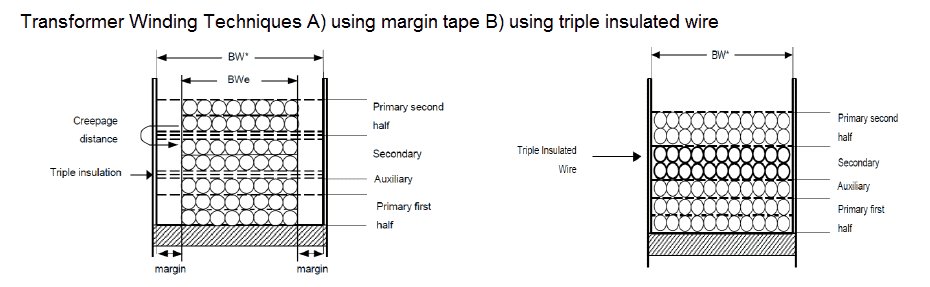
Emplear un hilo con triple aislamiento para el devanado secundario es la opción más fácil para afirmar rápidamente las leyes de seguridad internacionales relativas a los diseños de SMPS flyback. Sin embargo, estos cables reforzados pueden tener un grosor un poco mayor en comparación con la variante normal que obliga al devanado a ocupar más espacio, y puede requerir un esfuerzo adicional para acomodarse dentro de la bobina seleccionada.
Paso 9
Cómo diseñar el circuito de abrazadera primaria
En la secuencia de conmutación, para los periodos de apagado del mosfet, un pico de alta tensión en forma de inductancia de fuga se somete a través del drenaje/fuente del mosfet, lo que podría dar lugar a una ruptura de avalancha, dañando finalmente el mosfet.
Para contrarrestar esto se suele configurar un circuito de sujeción a través del devanado primario, que limita instantáneamente el pico generado a algún valor inferior seguro.
Encontrará un par de diseños de circuitos de sujeción que pueden incorporarse para este fin, como se muestra en la siguiente figura.
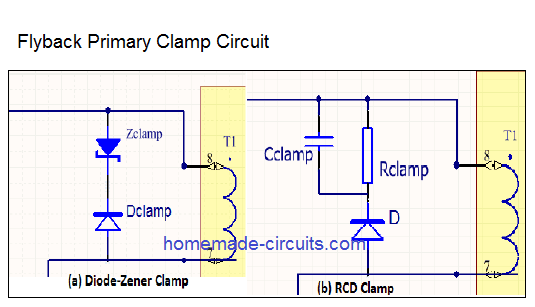
Estos son, concretamente, la sujeción RCD y la sujeción Diodo/Zener, siendo esta última mucho más fácil de configurar e implementar que la primera opción. En este circuito de abrazadera utilizamos una combinación de un diodo rectificador y un diodo Zener de alto voltaje como un TVS (supresor de voltaje transitorio) para sujetar el pico de tensión.
La función del diodo Zener es recortar o limitar eficazmente el pico de tensión hasta que la tensión de fuga se desvíe completamente a través del diodo Zener. La ventaja de una pinza Zener de diodo es que el circuito se activa y pinza sólo cuando el valor combinado de VR y Vspike supera la especificación de ruptura del diodo Zener, y a la inversa, mientras el pico esté por debajo de la ruptura del Zener o de un nivel seguro, la pinza puede no activarse en absoluto, no permitiendo ninguna disipación de energía innecesaria.
Cómo seleccionar el valor del diodo de sujeción/Zener
Siempre debe ser el doble del valor de la tensión reflejada VR, o de la tensión de pico supuesta.
El diodo rectificador debe ser de recuperación ultrarrápida o un diodo de tipo schottky que tenga un valor superior a la tensión máxima de enlace de CC.
La opción alternativa de sujeción de tipo RCD tiene la desventaja de ralentizar el dv/dt del MOSFET. Aquí el parámetro de la resistencia del resistor se vuelve crucial mientras se limita el pico de tensión. Si se selecciona un valor bajo de Rclamp, mejorará la protección contra picos pero podría aumentar la disipación y desperdiciar energía. Por el contrario, si se selecciona un valor más alto de Rclamp, esto ayudaría a minimizar la disipación pero podría no ser tan eficaz en la supresión de los picos.
Respecto a la figura anterior, para asegurar que VR = Vspike, se podría utilizar la siguiente fórmula
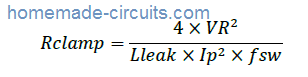
Donde Lleak significa la inductancia del transformador, y podría encontrarse haciendo un cortocircuito a través del devanado secundario, o alternativamente, se podría incorporar un valor de regla general aplicando del 2 al 4% del valor de la inductancia primaria.
En este caso el condensador Cclamp debería ser sustancialmente grande para inhibir una subida de tensión durante el periodo de absorción de la energía de fuga.
El valor de Cclamp puede seleccionarse entre 100pF y 4,7nF, la energía almacenada dentro de este condensador será descargada y refrescada por Rclamp rápidamente durante cada ciclo de conmutación.
Paso10
Cómo seleccionar el diodo rectificador de salida

Se puede calcular utilizando la fórmula mostrada anteriormente.
Asegúrese de seleccionar las especificaciones de forma que la tensión inversa máxima o el VRRM del diodo no sea inferior al 30% del VRVdiode, y asegúrese también de que la IF o la especificación de la corriente de avalancha hacia delante sea como mínimo un 50% mayor que el IsecRMS. Preferiblemente, elija un diodo schottky para minimizar las pérdidas de conducción.
Con un circuito DCM, la corriente de pico de Flyback puede ser alta, por lo tanto, intente seleccionar un diodo que tenga una tensión directa más baja y una especificación de corriente relativamente más alta, con respecto al nivel de eficiencia deseado.
Paso11
Cómo seleccionar el valor del condensador de salida
Seleccionar un condensador de salida correctamente calculado mientras se diseña un flyback puede ser extremadamente crucial, porque en una topología flyback la energía inductiva almacenada no está disponible entre el diodo y el condensador, lo que implica que el valor del condensador necesita ser calculado considerando 3 criterios importantes:
1) Capacitancia
2) ESR
3) Corriente RMS
El valor mínimo posible podría identificarse dependiendo de la función de la tensión de rizado de salida máxima aceptable de pico a pico, y puede identificarse a través de la siguiente fórmula:

Donde Ncp significa el número de pulsos de reloj del lado primario requeridos por la retroalimentación de control para controlar el deber de los valores máximos y mínimos especificados. Esto puede requerir típicamente alrededor de 10 a 20 ciclos de conmutación.
Iout se refiere a la corriente de salida máxima (Iout = Poutmax / Vout).
Para identificar el valor RMS máximo del condensador de salida, utilice la siguiente fórmula:

Para una frecuencia de conmutación alta especificada del flyback, la corriente de pico máxima del lado secundario del transformador generará una tensión de ondulación correspondientemente alta, impuesta a través de la ESR equivalente del condensador de salida. Teniendo en cuenta esto, debe garantizarse que el valor nominal de ESRmax del condensador no supere la capacidad de corriente de rizado aceptable especificada del condensador.
El diseño final puede incluir fundamentalmente el valor nominal de tensión deseado, y la capacidad de corriente de rizado del condensador, basándose en la relación real de la tensión de salida seleccionada y la corriente del flyback.

Asegúrese de que el valor de la ESR se determina a partir de la hoja de datos basada en la frecuencia superior a 1kHz, que puede suponerse típicamente entre 10kHz a 100kHz.
Es interesante observar que un condensador solitario con una especificación de baja ESR puede ser suficiente para controlar el rizado de salida. Puede intentar incluir un pequeño filtro LC para corrientes de pico más altas, especialmente si el flyback está diseñado para trabajar con un modo DCM, que podría garantizar un control razonablemente bueno de la tensión de rizado en la salida.
Paso12
Otras consideraciones importantes:
A) Cómo seleccionar la tensión y la corriente nominal, para el rectificador de puente del lado primario.

Se puede hacer a través de la ecuación anterior.
En esta fórmula PF representa el factor de potencia de la fuente de alimentación, podemos aplicar 0,5 en caso de que una referencia adecuada quede fuera del alcance. Para el puente rectificador, seleccione los diodos o el módulo que tenga una capacidad de amperaje hacia adelante 2 veces mayor que el IACRMS. Para la tensión nominal, podría seleccionarse a 600V para una especificación de entrada máxima de 400V AC.
B) Cómo seleccionar la resistencia de detección de corriente (Rsense):
Se puede calcular con la siguiente ecuación. La resistencia de detección Rsense se incorpora para interpretar la potencia máxima en la salida del flyback. El valor de Vcsth puede determinarse consultando la hoja de datos del CI controlador, Ip(max) significa la corriente primaria.

C) Selección de la VCC del Condensador:
Un valor óptimo de capacitancia es crucial para que el condensador de entrada rinda un periodo de arranque adecuado. Típicamente cualquier valor entre 22uF a 47uF hace el trabajo bien. Sin embargo, si se selecciona un valor mucho más bajo, podría provocar un «bloqueo por bajo voltaje» en el circuito integrado del controlador, antes de que el convertidor pueda desarrollar el Vcc. Por el contrario, un valor de capacidad más grande podría resultar en un retraso indeseable del tiempo de arranque del convertidor.
Además, asegúrese de que este condensador es de la mejor calidad, con muy buena ESR y especificaciones de corriente de ondulación, a la par con las especificaciones del condensador de salida. Se recomienda encarecidamente conectar otro condensador de menor valor, del orden de 100nF, en paralelo con el condensador mencionado anteriormente, y lo más cerca posible de los pines Vcc/tierra del CI del controlador.
D) Configuración del bucle de realimentación:
La compensación del bucle de realimentación es importante para detener la generación de oscilaciones. La configuración de la compensación del bucle puede ser más sencilla para el modo flyback DCM que para el CCM, debido a la ausencia de «cero de medio plano derecho» en la etapa de potencia y, por lo tanto, no se requiere ninguna compensación.
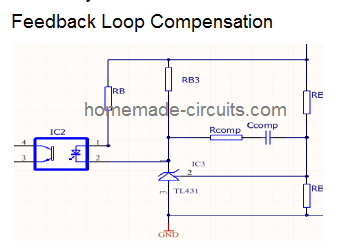
Como se indica en la figura anterior, un RC sencillo (Rcomp, Ccomp) suele ser suficiente para mantener una buena estabilidad en el bucle. En general, el valor de Rcomp puede seleccionarse entre 1K y 20K, mientras que Ccomp puede estar en el rango de 100nF y 470pF.