Technika filtrované zpětné projekce je jednou z nejzavedenějších algoritmických technik pro tento problém. Je koncepčně jednoduchá, laditelná a deterministická. Je také výpočetně nenáročná, moderní skenery vyžadují pouze několik milisekund na jeden snímek. není to však jediná dostupná technika: původní EMI skener řešil problém tomografické rekonstrukce pomocí lineární algebry, ale tento přístup byl omezen vysokou výpočetní složitostí, zejména s ohledem na tehdy dostupnou výpočetní techniku. V nedávné době výrobci vyvinuli iterativní techniky maximalizace očekávání na základě fyzikálního modelu. Tyto techniky jsou výhodné, protože využívají interní model fyzikálních vlastností skeneru a fyzikálních zákonů interakce rentgenového záření. Dřívější metody, jako je filtrovaná zpětná projekce, předpokládají dokonalý skener a velmi zjednodušenou fyziku, což vede k řadě artefaktů, vysokému šumu a zhoršenému rozlišení obrazu. Iterativní techniky poskytují snímky s lepším rozlišením, sníženým šumem a menším množstvím artefaktů a také možnost za určitých okolností výrazně snížit dávku záření. Nevýhodou je velmi vysoká výpočetní náročnost, ale pokrok v počítačové technologii a vysoce výkonné výpočetní techniky, jako je použití vysoce paralelních algoritmů GPU nebo využití specializovaného hardwaru, jako jsou FPGA nebo ASIC, nyní umožňují praktické využití.
Základní principEdit
V této části bude vysvětlen základní princip tomografie v případě, že se používá zejména tomografie využívající optický systém s paralelním ozařováním paprsků.
Tomografie je technologie, která využívá tomografický optický systém k získání virtuálních „řezů“ (tomografický obraz) určitého průřezu skenovaného objektu, což umožňuje uživateli vidět dovnitř objektu bez řezání. Existuje několik typů tomografického optického systému včetně optického systému s paralelním ozařováním paprsků. Optický systém s paralelním ozařováním paprsků může být nejjednodušším a nejpraktičtějším příkladem tomografického optického systému, proto bude v tomto článku vysvětlení „Jak získat tomografický obraz“ založeno na „optickém systému s paralelním ozařováním paprsků“. Rozlišovací schopnost v tomografii se obvykle popisuje Crowtherovým kritériem.
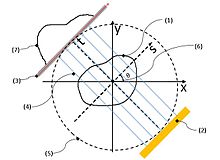
Obrázek 3 je určen k ilustraci matematického modelu a k znázornění principu tomografie. Na obr. 3 je koeficient absorpce v průřezové souřadnici (x, y) předmětu modelován jako μ(x, y). Úvaha založená na výše uvedených předpokladech může objasnit následující body. Proto v tomto oddíle postupujeme ve výkladu podle následujícího pořadí:
- (1)Výsledky měření, tj. série snímků získaných procházejícím světlem, jsou vyjádřeny (modelovány) jako funkce p (s,θ) získaná provedením radonové transformace na μ(x, y) a
- (2)μ(x, y) je obnoveno provedením inverzní radonové transformace na výsledky měření.
(1)Výsledky měření p(s,θ) paralelního paprskového ozařovacího optického systémuUpravit
Uvažuje se matematický model tak, že koeficient absorpce objektu v každém (x,y) jsou reprezentovány μ(x,y) a předpokládá se, že „přenosový paprsek proniká bez difrakce, rozptylu nebo odrazu, přestože je objektem absorbován, a jeho útlum se předpokládá podle Beerova-Lambertova zákona.V této věci to, co chceme vědět“, je μ(x,y) a to, co můžeme změřit, bude následující p(s,θ).
Pokud je útlum v souladu s Beer-Lambertovým zákonem, platí vztah mezi I 0 {\displaystyle {I}_{0}}.

a I {\displaystyle I}

je následující (rovnice 1), a proto absorbance ( p l {\displaystyle p_{l}}

) podél dráhy světelného paprsku (l(t)) je následující (rovnice 2). Zde I 0 {\displaystyle {I}_{0}}
je intenzita světelného paprsku před přenosem I {\displaystyle I}
je intenzita po přenosu. I = I 0 exp ( – ∫ μ ( x , y ) d l ) = I 0 exp ( – ∫ – ∞ ∞ μ ( l ( t ) ). | l ˙ ( t ) | d t ) {\displaystyle I=I_{0}\exp \left({-\int \mu (x,y)\,dl}\right)=I_{0}\exp \left({-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{\dot {l}}(t)|dt}\right)}

(rov. 1) p l = ln ( I / I 0 ) = – ∫ μ ( x , y ) d l = – ∫ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t {\displaystyle p_{l}=\ln(I/I_{0})=-\int \mu (x,y)\,dl=-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{\dot {l}}(t)|dt}

(rov. 2)
Směr od zdroje světla k obrazovce je zde definován jako směr t a směr kolmý na směr t a rovnoběžný s obrazovkou je definován jako směr s. (Oba souřadnicové systémy t-s a x-y jsou nastaveny tak, že se vzájemně odrážejí bez zrcadlově-reflexní transformace)
Při použití optického systému s paralelním ozařováním lze experimentálně získat sérii fluoroskopických obrazů (jednorozměrný obraz“ pθ(s) určitého průřezu snímaného objektu) pro každé θ. Zde θ představuje úhel mezi objektem a vysílacím světelným svazkem. Na obr. 3 se rovina X-Y otáčí proti směru hodinových ručiček kolem výchozího bodu v rovině tak, „aby byl zachován vzájemný polohový vztah mezi zdrojem světla (2) a obrazovkou (7) procházející trajektorií (5)“. Úhel natočení je v tomto případě stejný jako výše zmíněný θ.
Paprsek svírající úhel θ,to bude soubor polí, reprezentovaný l ( t ) {\displaystyle {l}_{}(t)}

následujících (rov. 3). l ( t ) = t + {\displaystyle {l}_{}(t)=t{\begin{bmatrix}-\sin \theta \\\cos \theta \\\end{bmatrix}}+{\begin{bmatrix}s\cos \theta \\s\sin \theta \\end{bmatrix}}}.

(např. 3)
Pθ(s) je definován následujícím způsobem (rov. 4). Že p θ ( s ) {\displaystyle p_{\theta }(s)}

se rovná integrálu z přímky μ(x,y) podél l ( t ) {\displaystyle {l}_{}(t)}
z (rov. 3) stejně jako z (rov. 2). To znamená, že p ( s , θ ) {\displaystyle p(s,\theta )}

z následujícího (rov. 5) je výslednicí Radonovy transformace μ(x,y). p θ ( s ) = – ∫ – ∞ ∞ μ ( s cos θ – t sin θ , s sin θ + t cos θ ) d t {\displaystyle p_{\theta }(s)=-{\int }_{-\infty }^{\infty }\mu (s\cos \theta -t\sin \theta ,s\sin \theta +t\cos \theta )\,dt}

(rovnice 4)
Můžeme definovat následující funkci dvou proměnných (rovnice 5). V tomto článku se následující p(s, θ) nazývá „soubor fluoroskopických obrazů“.
p (s, θ)=pθ(s) (rov. 5)
(2)μ(x, y) se obnoví provedením inverzní radonové transformace na výsledky měřeníEdit
„Co chceme vědět (μ(x,y))“ lze rekonstruovat z „Co jsme naměřili ( p(s,θ))“ pomocí inverzní radonové transformace .ve výše uvedených popisech je „Co jsme naměřili“ p(s,θ) . Na druhé straně „Co chceme vědět “ je μ(x,y). Další otázka tedy bude „Jak rekonstruovat μ(x,y) z p(s,θ)“.
.