Teknikken med filtreret tilbageprojektion er en af de mest etablerede algoritmiske teknikker til dette problem. Den er begrebsmæssigt enkel, indstillelig og deterministisk. Den er også beregningsmæssigt ukrævende, idet moderne scannere kun kræver nogle få millisekunder pr. billede.Det er imidlertid ikke den eneste tilgængelige teknik: Den oprindelige EMI-scanner løste det tomografiske rekonstruktionsproblem ved hjælp af lineær algebra, men denne fremgangsmåde var begrænset af sin høje beregningskompleksitet, især i betragtning af den computerteknologi, der var til rådighed på det tidspunkt. I nyere tid har producenterne udviklet iterative, fysisk modelbaserede maximum likelihood forventningsmaksimeringsteknikker. Disse teknikker er fordelagtige, fordi de anvender en intern model af scannerens fysiske egenskaber og af de fysiske love for røntgeninteraktioner. Tidligere metoder, som f.eks. filtreret bagprojektion, forudsætter en perfekt scanner og stærkt forenklet fysik, hvilket fører til en række artefakter, høj støj og nedsat billedopløsning. Iterative teknikker giver billeder med forbedret opløsning, mindre støj og færre artefakter samt mulighed for at reducere stråledosis i høj grad under visse omstændigheder. Ulempen er et meget højt beregningskrav, men fremskridt inden for computerteknologi og højtydende computerteknikker, såsom anvendelse af meget parallelle GPU-algoritmer eller anvendelse af specialiseret hardware såsom FPGA’er eller ASIC’er, gør det nu muligt at anvende dem i praksis.
GrundprincipRediger
I dette afsnit forklares grundprincippet for tomografi i det tilfælde, hvor der især anvendes tomografi, der udnytter det optiske system med parallelstrålebestråling.
Tomografi er en teknologi, der anvender et tomografisk optisk system til at opnå virtuelle “skiver” (et tomografisk billede) af et specifikt tværsnit af et scannet objekt, hvilket giver brugeren mulighed for at se ind i objektet uden at skære. Der findes flere typer af tomografiske optiske systemer, herunder det optiske system med parallelstrålebestråling. Det optiske system med parallelstrålebestråling er måske det nemmeste og mest praktiske eksempel på et tomografisk optisk system, og derfor vil forklaringen af “Hvordan man opnår et tomografisk billede” i denne artikel være baseret på “det optiske system med parallelstrålebestråling”. Opløsningen i tomografi beskrives typisk ved Crowther-kriteriet.
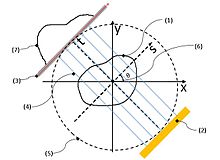
Figur 3 har til formål at illustrere den matematiske model og at illustrere tomografiens princip. I fig. 3 er absorptionskoefficienten ved en tværsnitskoordinat (x, y) af emnet modelleret som μ(x, y). Overvejelser baseret på ovenstående forudsætninger kan tydeliggøre følgende punkter. I dette afsnit fremføres forklaringen derfor i følgende rækkefølge:
- (1)Måleresultater, dvs. en række billeder, der er opnået med transmitteret lys, udtrykkes (modelleres) som en funktion p (s,θ), der opnås ved at udføre radontransformation til μ(x, y), og
- (2)μ(x, y) genskabes ved at udføre omvendt radontransformation til måleresultater.
(1)Resultaterne af måling p(s,θ) af optisk system med parallelstrålebestrålingRediger
Den matematiske model er sådan, at objektets absorptionskoefficient ved hver (x,y) er repræsenteret ved μ(x,y), og man antager, at “transmissionsstrålen trænger igennem uden diffraktion, diffusion eller refleksion, selv om den absorberes af objektet, og dens dæmpning antages at ske i overensstemmelse med Beer-Lambert-loven.I denne sag er det, vi ønsker at vide” μ(x,y), og det, vi kan måle, vil være efter p(s,θ).
Når dæmpningen er i overensstemmelse med Beer-Lambert-loven, er forholdet mellem I 0 {\displaystyle {I}_{0}}

og I {\displaystyle I}

er som følger (eq.1), og derfor er absorbansen ( p l {\displaystyle p_{l}}}

) langs lysstrålens vej (l(t)) som følger (eq.2). Her er I 0 {\displaystyle {I}_{0}}}
er intensiteten af lysstrålen før transmission I {\displaystyle I}
er intensiteten af efter transmission. I = I 0 exp ( – ∫ μ ( x , y ) d l ) = I 0 exp ( – ∫ – ∞ ∞ ∞ μ ( l ( t ) ) ) | l ˙ ( t ) | d t ) {\displaystyle I=I_{0}\exp \left({-\int \mu (x,y)\,dl}\right)=I_{0}\exp \left({-{\int }_{-{-\infty }^{\infty }\mu (l(t))\,|{{{\dot {l}}}(t)|dt}\right)}

(eq. 1) p l = ln ( I / I 0 ) = – ∫ μ ( x , y ) d l = – ∫ – ∞ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t {\displaystyle p_{l}=\ln(I/I_{0})=-\int \mu (x,y)\,dl=-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{{\dot {l}}}(t)|dt}

(eq. 2)
Her defineres en retning fra lyskilden mod skærmen som t-retningen og en retning vinkelret på t-retningen og parallel med skærmen som s-retningen. (Både t-s- og x-y-koordinatsystemerne er opstillet således, at de reflekterer hinanden uden spejlreflekterende transformation.)
Ved anvendelse af et optisk system med parallelstrålebestråling kan man eksperimentelt opnå serien af fluoroskopiske billeder (et endimensionelt billede” pθ(s) af et specifikt tværsnit af et scannet objekt) for hvert θ. Her repræsenterer θ vinklen mellem objektet og transmissionslysstrålen. I fig. 3 roterer X-Y-planet mod uret omkring udgangspunktet i planen på en sådan måde, at “det gensidige positionsforhold mellem lyskilden (2) og skærmen (7), der passerer gennem banen (5), bevares”. Rotationsvinklen i dette tilfælde er den samme som ovennævnte θ.
Den stråle, der har en vinkel θ,til vil være samlingen af lays, repræsenteret ved l ( t ) {\displaystyle {l}_{}(t)}

af følgende (ækv. 3). l ( t ) = t + {\displaystyle {l}_{}(t)=t{\begin{bmatrix}-\sin \theta \\\cos \theta \\end{bmatrix}}}+{\begin{bmatrix}s\cos \theta \\s\s\sin \theta \\end{bmatrix}}}

(eq. 3)
Den pθ(s) er defineret ved følgende (gl. 4). At p θ ( s ) {\displaystyle p_{\theta }(s)}

er lig med linieintegralet af μ(x,y) langs l ( t ) {\displaystyle {l}_{}(t)}
i (eq. 3) på samme måde som i (eq.2). Det betyder, at p ( s , θ ) {\displaystyle p(s,\theta )}

af følgende (eq. 5) er en resultant af Radon-transformationen af μ(x,y). p θ ( s ) = – ∫ – ∞ ∞ ∞ μ ( s cos θ – t sin θ , s sin θ + t cos θ ) d t {\displaystyle p_{\theta }(s)=-{\int }_{-\infty }^{\infty }\mu (s\cos \theta -t\sin \theta ,s\sin \theta +t\cos \theta )\,dt}

(eq. 4)
Man kan definere følgende funktion af to variabler (eq. 5). I denne artikel kaldes følgende p(s, θ) for at være “samlingen af fluoroskopiske billeder”.
p (s, θ)=pθ(s) (gl. 5)
(2)μ(x, y) gendannes ved at udføre omvendt radontransformation til måleresultaterRediger
“Det, vi ønsker at vide (μ(x,y))” kan rekonstrueres fra “Det, vi har målt ( p(s,θ))” ved hjælp af omvendt radontransformation .I de ovennævnte beskrivelser er “Det, vi har målt” p(s,θ) . På den anden side er “det, vi ønsker at vide” μ(x,y) . Så det næste vil være “Hvordan rekonstrueres μ(x,y) ud fra p(s,θ)”.