Tekniken med filtrerad bakåtprojektion är en av de mest etablerade algoritmiska teknikerna för detta problem. Den är konceptuellt enkel, inställbar och deterministisk. Den är också beräkningsmässigt obehövlig, och moderna skannrar kräver endast några millisekunder per bild.Detta är dock inte den enda tillgängliga tekniken: den ursprungliga EMI-skannern löste det tomografiska rekonstruktionsproblemet med linjär algebra, men detta tillvägagångssätt begränsades av sin höga beräkningskomplexitet, särskilt med tanke på den datorteknik som fanns tillgänglig vid den tiden. På senare tid har tillverkarna utvecklat iterativa fysikaliska modellbaserade tekniker för maximal sannolikhetsförväntningsmaximering. Dessa tekniker är fördelaktiga eftersom de använder en intern modell av skannerns fysiska egenskaper och av de fysiska lagarna för röntgeninteraktioner. Tidigare metoder, t.ex. filtrerad bakåtprojektion, förutsätter en perfekt skanner och starkt förenklad fysik, vilket leder till ett antal artefakter, högt brus och försämrad bildupplösning. Iterativa tekniker ger bilder med förbättrad upplösning, minskat brus och färre artefakter samt möjlighet att kraftigt minska stråldosen under vissa omständigheter. Nackdelen är ett mycket högt beräkningskrav, men framsteg inom datorteknik och högpresterande beräkningstekniker, t.ex. användning av mycket parallella GPU-algoritmer eller användning av specialiserad hårdvara som FPGA:er eller ASIC:er, möjliggör nu praktisk användning.
Grundläggande principRedigera
I detta avsnitt förklaras den grundläggande principen för tomografi i det fall som särskilt använder tomografi som utnyttjar det optiska systemet med parallellstrålning.
Tomografi är en teknik som använder ett tomografiskt optiskt system för att erhålla virtuella ”skivor” (en tomografisk bild) av ett specifikt tvärsnitt av ett skannat objekt, vilket gör det möjligt för användaren att se inuti objektet utan att skära. Det finns flera typer av tomografiska optiska system, bland annat det optiska systemet med parallellstrålning. Det optiska systemet med parallellstrålning kan vara det enklaste och mest praktiska exemplet på ett tomografiskt optiskt system, därför kommer förklaringen av ”Hur man får fram en tomografisk bild” i denna artikel att baseras på ”det optiska systemet med parallellstrålning”. Upplösningen i tomografi beskrivs vanligtvis med Crowther-kriteriet.
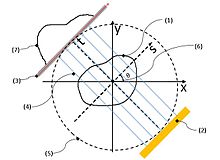
Figuren 3 är avsedd att illustrera den matematiska modellen och illustrera principen för tomografi. I fig. 3 modelleras absorptionskoefficienten vid en tvärsnittskoordinat (x, y) av ämnet som μ(x, y). Överväganden baserade på ovanstående antaganden kan klargöra följande punkter. I detta avsnitt avanceras därför förklaringen enligt följande ordning:
- (1)Mätresultat, dvs. en serie bilder som erhålls med genomstrålat ljus, uttrycks (modelleras) som en funktion p (s, θ) som erhålls genom att utföra radontransformation till μ(x, y), och
- (2)μ(x, y) återställs genom att utföra omvänd radontransformation till mätresultat.
(1)Resultaten av mätningen p(s,θ) av det optiska systemet med parallellstrålningEdit
Den matematiska modellen är sådan att objektets absorptionskoefficient vid varje (x,y) representeras av μ(x,y) och man antar att ”transmissionsstrålen tränger igenom utan diffraktion, diffusion eller reflektion även om den absorberas av objektet och dess dämpning antas inträffa i enlighet med Beer-Lambert-lagen.I denna fråga är det vi vill veta” μ(x,y) och det vi kan mäta kommer att följa p(s,θ).
När dämpningen följer Beer-Lambert-lagen är förhållandet mellan I 0 {\displaystyle {I}_{0}}

och I {\displaystyle I}

är följande (ekv. 1) och därför är absorbansen ( p l {\displaystyle p_{l}}}

) längs ljusstrålens väg (l(t)) följande (ekv. 2). Här är I 0 {\displaystyle {I}_{0}}}
är ljusstrålens intensitet före överföring I {\displaystyle I}
är intensiteten efter överföringen. I = I 0 exp ( – ∫ μ ( x , y ) d l ) = I 0 exp ( – ∫ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t ) {\displaystyle I=I_{0}\exp \left({-\int \mu (x,y)\,dl}\right)=I_{0}\exp \left({-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{{\dot {l}}(t)|dt}\right)}

(eq. 1) p l = ln ( I / I 0 ) = – ∫ μ ( x , y ) d l = – ∫ – ∞ ∞ μ ( l ( t ) ) | l ˙ ( t ) | d t {\displaystyle p_{l}=\ln(I/I_{0})=-\int \mu (x,y)\,dl=-{\int }_{-\infty }^{\infty }\mu (l(t))\,|{\dot {l}}(t)|dt}

(eq. 2)
Här definieras en riktning från ljuskällan mot skärmen som t-riktning och en riktning vinkelrätt mot t-riktningen och parallell med skärmen definieras som s-riktning. (Både t-s- och x-y-koordinatsystemen är uppställda så att de reflekteras av varandra utan spegelreflekterande omvandling.)
Med hjälp av ett optiskt system för bestrålning med parallellstrålning kan man experimentellt erhålla serien av fluoroskopiska bilder (en endimensionell bild” pθ(s) av ett specifikt tvärsnitt av ett skannat objekt) för varje θ. Här representerar θ vinkeln mellan objektet och den sändande ljusstrålen. I figur 3 roterar X-Y-planet moturs runt ursprungspunkten i planet på ett sådant sätt ”att det ömsesidiga lägesförhållandet mellan ljuskällan (2) och skärmen (7) som passerar genom banan (5) bibehålls”. Rotationsvinkeln i detta fall är densamma som ovan nämnda θ.
Strålen som har en vinkel θ,till kommer att vara samlingen av lays, representerad av l ( t ) {\displaystyle {l}_{}(t)}

av följande (ekv. 3). l ( t ) = t + {\displaystyle {l}_{}(t)=t{\begin{bmatrix}-\sin \theta \\\cos \theta \\end{bmatrix}}+{\begin{bmatrix}s\cos \theta \\s\s\sin \theta \\end{bmatrix}}}

(eq. 3)
Pθ(s) definieras enligt följande (ekv. 4). Att p θ ( s ) {\displaystyle p_{\theta }(s)}

är lika med linjeintegralen av μ(x,y) längs l ( t ) {\displaystyle {l}_{}(t)}
i (ekv. 3) på samma sätt som i (ekv. 2). Det innebär att p ( s , θ ) {\displaystyle p(s,\theta )}

av följande (ekv. 5) är en resultant av Radontransformationen av μ(x,y). p θ ( s ) = – ∫ – ∞ ∞ μ ( s cos θ – t sin θ , s sin θ + t cos θ ) d t {\displaystyle p_{\theta }(s)=-{\int }_{-\infty }^{\infty }\mu (s\cos \theta -t\sin \theta ,s\sin \theta +t\cos \theta )\,dt}

(ekv. 4)
Det går att definiera följande funktion för två variabler (ekv. 5). I denna artikel kallas följande p(s, θ) för ”samlingen av fluoroskopiska bilder”.
p (s, θ)=pθ(s) (ekv. 5)
(2)μ(x, y) återställs genom att utföra invers radontransform till mätresultatEdit
”Vad vi vill veta (μ(x, y))” kan rekonstrueras från ”Vad vi mätte ( p(s, θ))” med hjälp av invers radontransformation .I de ovan nämnda beskrivningarna är ”Vad vi mätte” p(s, θ) . Å andra sidan är ”Vad vi vill veta” μ(x,y). Så nästa blir ”Hur rekonstruerar man μ(x,y) från p(s,θ)”.